
 One day a few years ago, I was on an instructional IFR flight from KSJC to KSCK with a very perceptive and talented instrument student. The flight conditions were IMC with KSCK ATIS reporting a ceiling of 600 feet, sky obscured and one-mile visibility. The tops were 2500 feet, a typical central California Winter morning. As we approached Stockton, the all familiar words came crackling over the radio “Cessna 9027Hotel, turn left to 320, maintain 2000 until established, cleared for the Stockton ILS runway 29R approach, circle to runway 11L”. My student immediately and mechanically pressed the PTT switch and blurted out “Roger, turn left to 320, maintain 2000 until established, cleared for the approach, 27 Hotel”.
One day a few years ago, I was on an instructional IFR flight from KSJC to KSCK with a very perceptive and talented instrument student. The flight conditions were IMC with KSCK ATIS reporting a ceiling of 600 feet, sky obscured and one-mile visibility. The tops were 2500 feet, a typical central California Winter morning. As we approached Stockton, the all familiar words came crackling over the radio “Cessna 9027Hotel, turn left to 320, maintain 2000 until established, cleared for the Stockton ILS runway 29R approach, circle to runway 11L”. My student immediately and mechanically pressed the PTT switch and blurted out “Roger, turn left to 320, maintain 2000 until established, cleared for the approach, 27 Hotel”.
She then looked down at the approach plate and after, what seemed like to her, an eternity because we were in actual IFR conditions, she asked me “How do I fly this approach? The approach plate is showing a Minimum Descent Altitude not a Decision Altitude”.
I was stopped in my tracks and dumbfounded. I suddenly realized that, I didn’t know the answer to her question, I was the CFI and we were in actual IFR conditions (all simultaneously). I had flown this approach literally hundreds of times before and for some reason, unknown to me, I had never noticed that with, what turns out to be, all published “ILS, circle to land” approaches you are not given a Decision Altitude (Height) but rather a Minimum Descent Altitude. I said, very calmly, to instill confidence, as any good CFI would, “Since we aren’t going to land, let’s fly it like an ILS, straight in approach, down to the MDA and we’ll talk about it later”.
Because of a tight schedule for both of us, later didn’t come for several days, which gave me some time to research an answer. The answer, that I sought, was not easily obtained and I’m not sure I’ve got it right yet. Let’s review a bit and you will understand my dilemma.
An ILS is a precision approach with a glide slope, localizer, final approach fix (which is the glide slope intercept point, at or below the minimum glide slope intercept altitude), decision altitude (height) and a missed approach point. A non-precision approach, on the other hand, has a final approach fix, a minimum descent altitude and a missed approach point.
The glide slope and a published decision altitude (height) are only found on precision approaches, while minimum descent altitudes are only found on non-precision approaches.
According to Jeppesen’s chart glossary the DA(H) is the altitude or height on a precision approach where a decision must be made. It, further, defines the minimum descent altitude as the lowest altitude authorized on a standard instrument approach procedure, where no electronic glide slope is provided. Sounds like to me, if you’re given a decision altitude (height) you’re doing a precision approach and if you’re given a minimum descent altitude you’re doing a non-precision approach. However, let’s look a little further.
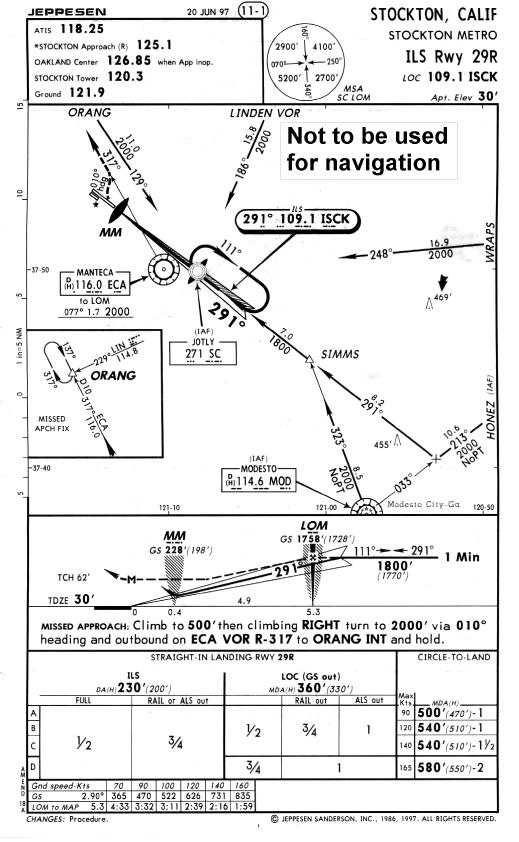
On a Jeppesen ILS approach chart, in the profile view, the precision approach flight path is traced with a solid black line, while the non-precision approach flight path (the Localizer – Glide Slope out) is traced using a dotted black line. These flight paths are the same until glide slope intercept. The precision approach then starts down along the glide slope to the DA(H) followed by the missed approach point. The non-precision approach, however, continues at the published altitude until reaching the non-precision final approach fix symbolized by the Maltese cross where it starts down to the MDA and eventually the missed approach point.
If we are given a minimum descent altitude, then we are executing a non-precision approach. We, therefore, are obligated to maintain our published or assigned altitude until we reach the non-precision final approach fix. This is, of course, well past the glide slope intercept point. We now are permitted to descend to the MDA at any reasonable rate. This rate could, initially, allow us to legally go well below the glide slope.
I conclude that, since on an “ILS, circle to land” approach we are not given a DA(H), but rather an MDA, therefore, we are executing a non-precision approach. It follows that, we can not legally start our descent at glide slope intercept and follow it down. We must maintain our altitude until the non-precision final approach fix and then start our descent. I, further conclude that, since the glide slope is one of four required parts of an ILS, this precludes the use of the term ILS to describe this approach procedure.
Therefore, there is no such thing as an “ILS, circle to land”. I think it would be much better and more accurate to call it a “localizer, circle to land” because that is what it is.
